
TETRIX® PRIME Hits the Bulls-EYE at USF
An engineering mentoring program at the University of South Florida is bringing STEM and real world learning to area youths by utilizing the TETRIX PRIME building system available from PITSCO.
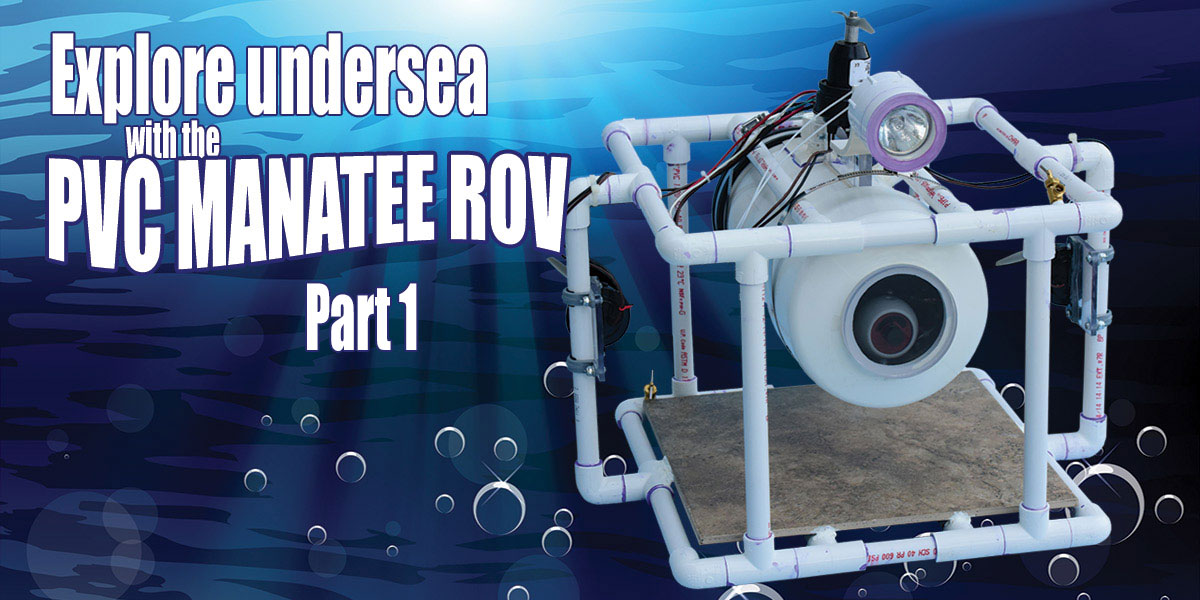
The ROV Manatee - Part 1
Living near the ocean opens up an opportunity to view and take video of underwater sea life – especially if you have your own ROV that is waterproof. Follow this short series to build your own underwater rover with easily acquired parts that can be assembled with basic tools.
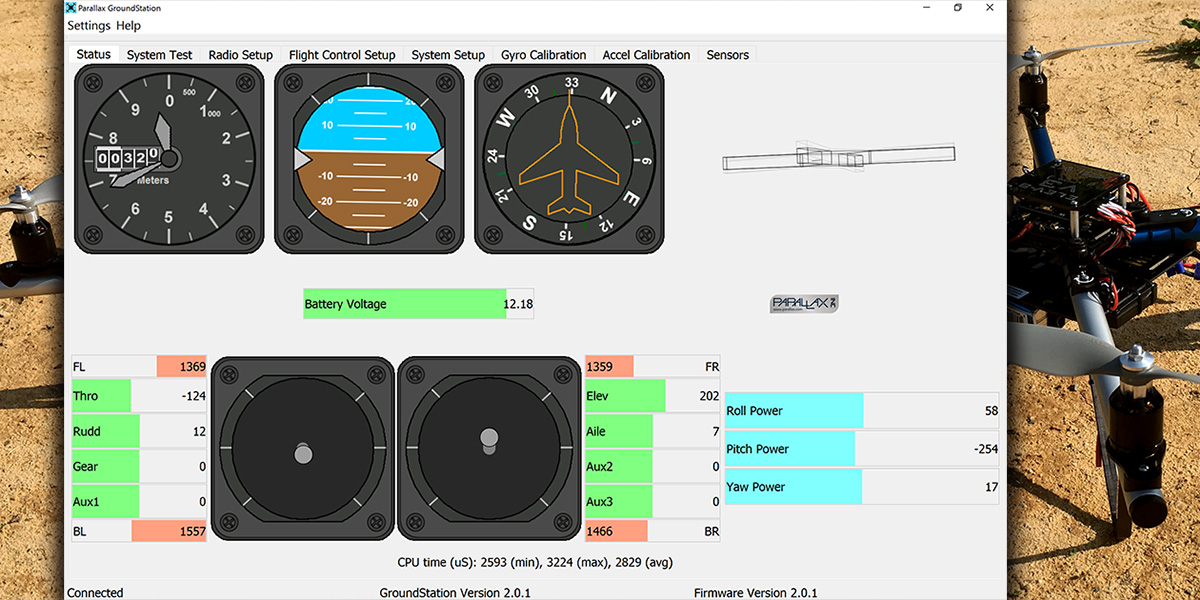
The Multi-Rotor Hobbyist — Adding Telemetry to the ELEV-8
Pilots of regular aircraft have a panel of instruments that indicate important parameters such as the aircraft altitude, air speed, attitude, and engine system status. In this episode, we are going to add a telemetry kit to the ELEV-8 v3 to get real time aircraft data sent back to our tablet in the field.

Robots
Underwater Remote Operated Vehicles: The Next Big Thing in Robotics?
Underwater Remotely Operated Vehicles (UROVs) — the little brothers to the massive commercial underwater vehicles used to inspect hulls, ship wrecks, and pipe lines — are where quadcopters were five years ago. However, with time, prices will drop, parts will become more plentiful, and the Web will be full of videos of underwater sea life and perhaps even battling UROVs.

Building Blocks
Coils of War
After a tough match at the Franklin Institute combat robot event, the windings (or coils) had come loose and had been damaged and in some places cut. Get some tips on how to harden and make effective repairs on these kinds of parts.
Building Blocks
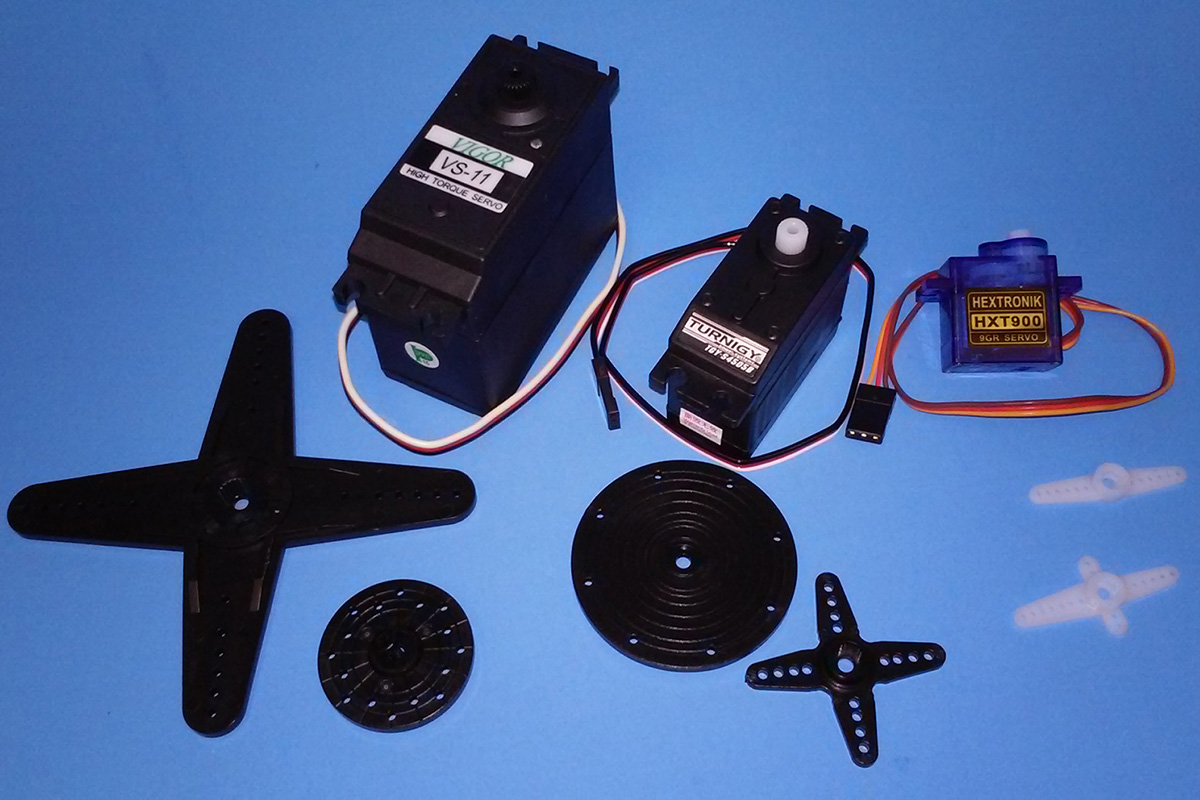
Analog Servos for Robotics
In some ways, analog servos are the “unsophisticated brutes” of the robotics world.Thoroughly understanding their strengths and limitations can help you identify which things are better handled in hardware vs. software.

Robots
Animatronics for the Do-It-Yourselfer
This new series of articles will explore the many methods, materials, and innovative new ideas to bring your robotic creations to life.
Building Blocks
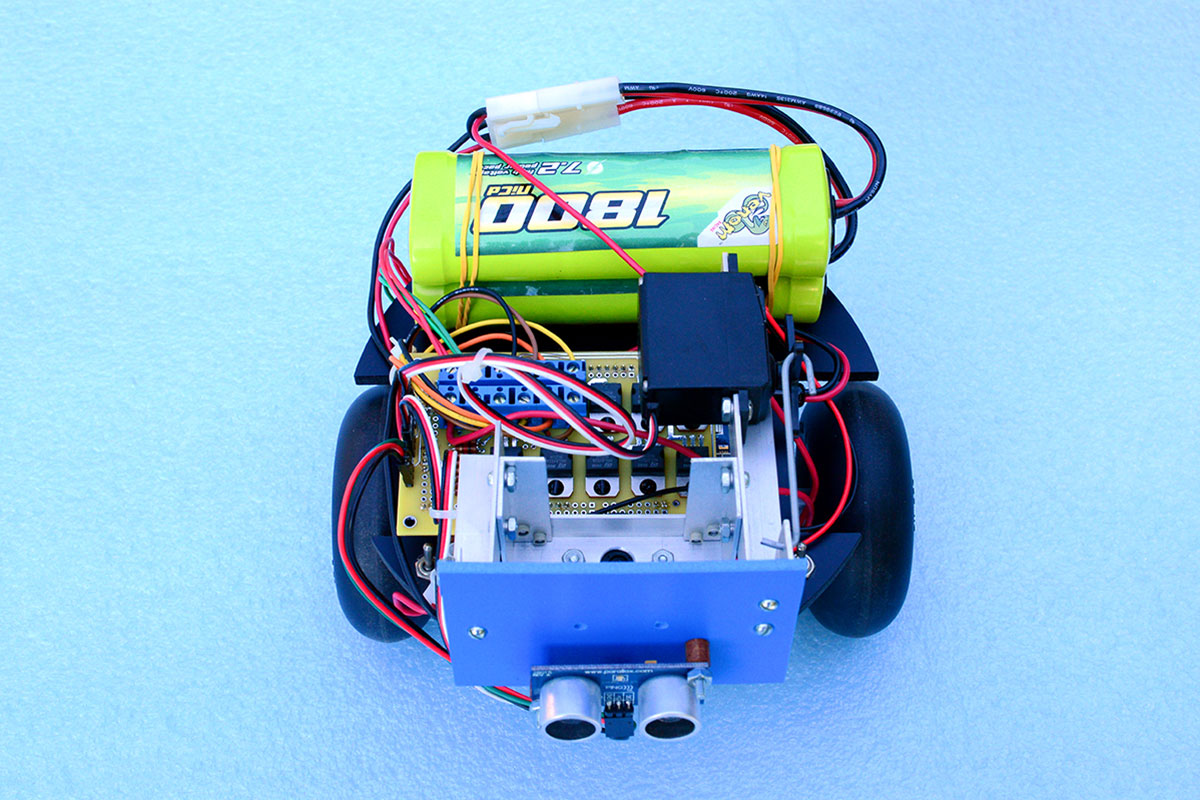
Using Stepper Motors for Wheeled Robot Propulsion
Stepper motors have the ability to precisely turn a wheel at a calculated distance and also the ability to brake, which makes them an interesting choice for robot propulsion, but not without some some tradeoffs.
History
Robots - How We’ve Built Them Over The Years
We take for granted all the motors, sensors, high power density batteries, and microcontrollers that are contained within today’s experimental robots. But, back in the day, some of the very best parts came from jukeboxes and pinball machines. Anything with parts that moved usually had something that was useful to robot builders.
Shop Best Sellers in THE Hobbyist JUNKBOX
The Official Webstore of Nuts & Volts and SERVO Magazine
SERVO 2015 CD-ROM
Includes all of Vol 13, issues 1 - 12 in pdf format, along with the 2015 article Media Downloads!
$24.95
PIC Robotics: A Beginner’s Guide to Robotics Projects Using the PIC Micro
11 easy-to-build robots each with a PICMicro "brain.”
$22.00
Arduino Robot Bonanza
Build autonomous robots using ordinary tools and common parts. Learn how to wire things up, program your robot's brain, and add your own unique flair.
$29.95