
Rescue Robots – A Biomimetic Approach
By Bryan Bergeron View In Digital Edition
Imagine that you’re charged with creating a semi-autonomous rescue robot that will move through the rubble of burning buildings to deliver protective gear and medical aid to victims. How would you go about programming the robot so that it would carry out the mission without harming itself?
And how would you implement an override to this survival behavior when you deem it necessary to sacrifice the robot in order to get help to a particular victim?
Well, there’s no one correct approach, but I’d start with biomimetics which involves searching for inspiration from biological systems. The biomimetic approach to robotics has resulted in significant advances in AI, robotic vision, and more lifelike human-robot interfaces.
In our example, because pain has a central role in survival in hostile environments, understanding human pain should help us design rescue robots that autonomously avoid injury to themselves while attempting to save human life.
Pain teaches us when to avoid permanent injury, when to rest, and when to keep moving. While we are programmed to seek pleasure and to avoid pain, pain usually produces a much stronger signal and the effects on behavior are longer lasting.
Moreover, much of our response to a pain signal involves a local reflex arc that doesn’t involve processing by the brain and so is virtually instantaneous.
When we layer more complex learned behavior on top of these local arcs, the direct input from the brain is usually to inhibit the reflex arc. For example, we learn early on through association that a hot flame on the stove can trigger those thermal pain receptors that signify pain.
Even so, we can opt to grab, for example, a hot pot handle when the contents are about to boil over or catch fire. The brain overrides the local loop.
Another factor to consider in our response to pain is the endocrine system, which is involved in the production and release of adrenaline into the bloodstream.
The effects adrenaline has on the operation of the reflex arc are complex. I won’t cover them in this brief introduction, but the effects of adrenaline and other hormones are worth exploring.
Figure 1 illustrates the basics of a loop response, including possible inhibition by the brain.
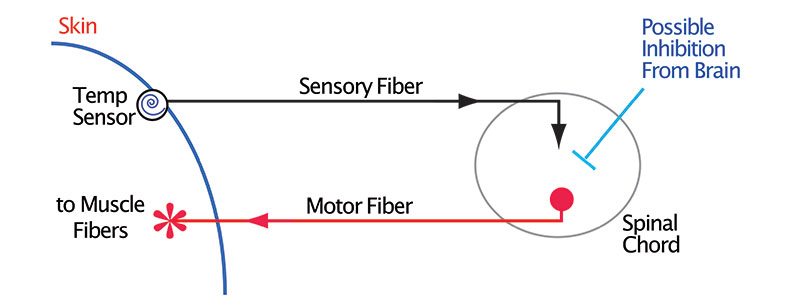
Figure 1. Local reflex arc with possible (-) inhibition by brain activity at the level of the spinal cord.
As shown in the figure, a temperature sensor in the skin senses excessive heat and sends a signal at the level of the spinal cord, causing a reflex signal through the motor fiber to muscle. Muscle fibers innervated by the motor fiber contract, resulting in movement in the limb or body. As a result, the organism lives to die another day.
Now let’s apply the biology to a rescue robot. We’ll need some temperature sensors on the exterior of the robot and a connection to the motor drive system.
Depending on the configuration of the robot — e.g., a tank vs. a legged crawler — an excessive temperature might cause the robot to stop, stop and reverse, or simply turn away from the heat source.
Now, consider the scenario when the remote user deems it necessary to potentially sacrifice the robot to bring supplies to a victim. Here’s where the inhibition from the brain model becomes useful. The user’s override signal enables the robot to, for example, move through flames toward the survivor.
With this model in mind, the firmware and software should follow. I’d go simple first — an Arduino-powered rolling robot.
When it gets to installing more complex behaviors, I might shift to a Raspberry Pi and a serious C compiler.
Overall, I expect that there will be some experimentation involved, but I know exactly what behaviors I want to invoke and when. The rest is simply a matter of programming. SV
Article Comments