Servo Magazine ( August 2009 )
The Evolution Of Experimental Robots
By Tom Carroll View In Digital Edition
A while back, I wrote about how we’ve built robots over the years and also wrote about the historical perspective of experimental robots. But what actually drove the designs? Why do we build what we do? What societal influences led us to certain designs? Certainly the development of microprocessors. Microcontrollers had the greatest impact in giving robot experimenters the ability to build robots with a lot of programmed functions and the ability to understand the many new sensors being developed for experimenters. But, what were the reasons that experimenters and hobbyists spent countless hours in their workshops dreaming of, designing, and building every type of robot one can imagine? Big robots, small robots, intelligent robots, R/C robots, battling robots, and even creations that defied the definition of a robot grew in workshops around the world.
Joe Engelberger, the ‘Father of Industrial Robots,’ was once quoted as saying “I can’t define a robot, but I know one when I see one.” Many people still debate the definition of a robot. It is this gray area of definition that has allowed all of us to explore so many directions in the creation of the ultimate robot.
The Influence of Isaac Asimov
Before I go into the many changes and directions that experimental robotics has undergone, I’d like to go over some of the literary and cinematic influences that have occurred to drive ideas and designs. No writer has had more influence on the concept of robots than sci-fi author, Isaac Asimov. He did not know how to build a robot, despite the mentioning of positronic brains and photocell eyes in his stories. He had a Ph.D. in Chemistry, not Engineering. The main human character in many of his ‘I Robot’ series of short stories was Dr. Susan Calvin, a robopsychologist. He was very knowledgeable and psychologically creative when it came to understanding the social interaction of robots with people and used Calvin in his stories to convey that message.
Starting back in 1940 with his story about Robbie in “Strange Playfellow,” his Three Laws of Robotics set the stage for gentle and safe robots to work and serve among people. Nobody — not even Asimov — could have imagined microprocessors and gigabyte memories the size of a thumbnail. Even transistors were unheard of. However, his robots worked well within the story lines and we will all be eternally grateful for his literary contributions. The recent Will Smith film i,Robot was loosely based on his stories, though the robots did get a bit out of hand in the end.
Influences from Movies
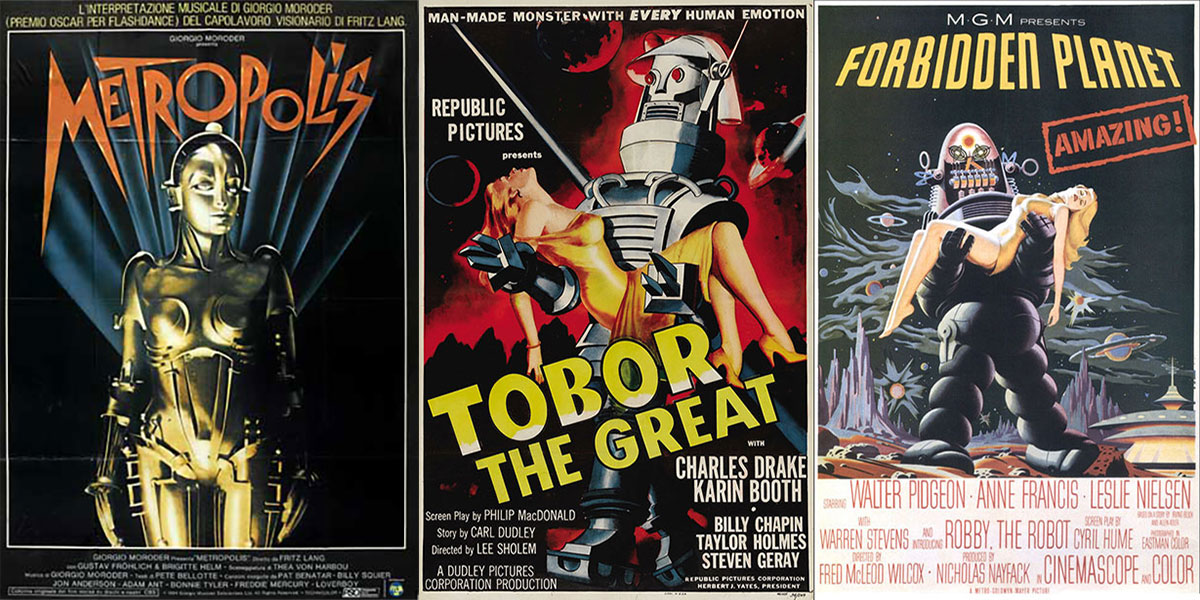
Probably the number one reason any of us ever built a robot, was we wanted to duplicate what we saw in movies. It was actually Karel Capek’s revolutionary play RUR in 1921 that introduced the word ‘robot’ to the public. The evil Maria from Fritz Lang’s 1927 movie classic Metropolis (shown in Figure 1) allowed people to see what a robot might look like as the term robot had only been around for a few years.

FIGURE 1.
Gort from the 1951 film When the Earth Stood Still was merely a very tall man in a silver wetsuit of sorts — not really something ‘buildable’ from a hobbyist’s point-of-view. Later, the towering robot from the movie Tobor the Great (robot spelled backwards) of 1954 inspired many a youngster to build their first bipedal robot. The impact of powerful and benevolent humanoid robots was another milestone in the thought processes of those building experimental robots, though functional bipedal robots were still decades away.
The Role of Robby the Robot
Robby from the 1956 MGM film Forbidden Planet seems to be the robot that set the first true experimenters on the course of building a real robot. Robby was nothing more than an uncomfortable mechanical suit worn by actor Frankie Darro, but unlike Tobor this robot had a personality. Inspired by Shakespeare’s play The Tempest, Robby is the film’s most memorable character and was responsible for many copies and robot variations over the years.
Figures 2 shows the theater lobby posters from Tobor the Great and Forbidden Planet.
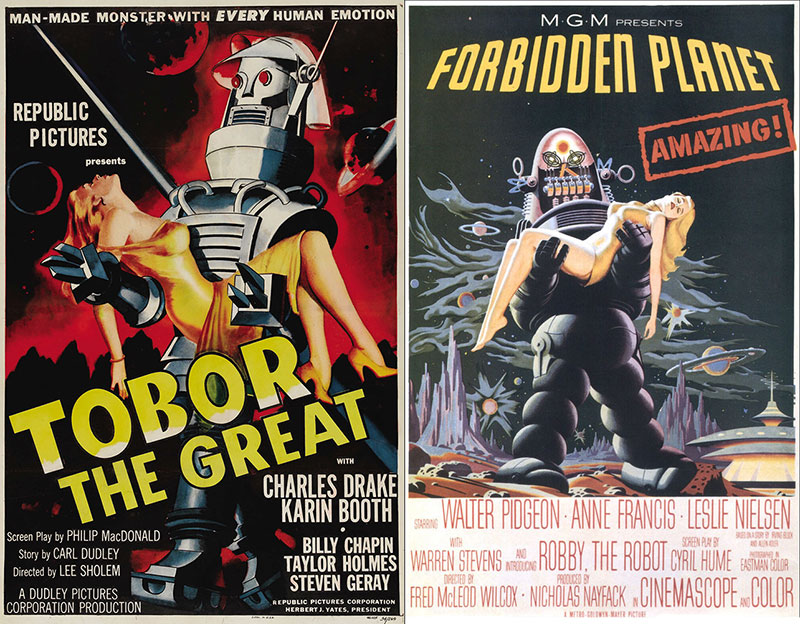
FIGURE 2.
Notice how an almost identical fainting blonde girl is being carried by both robots — a promotional trend in sci-fi movies of the 50s. No such actions occurred in either film.
Not only did the person in the Robby suit have to contend with the cramped and hot interior, he also had to deal with over a half mile of wiring, many switches, solenoids, motors, and lights that operated the many external special effects. A major chore for the actor was trying to walk while keeping balanced in the heavy suit. The $125,000 spent on the construction of it was a huge amount for an action prop in 1955.
Designed by Art Director Robert Kinoshita, the suit ended up being one of the most complex props ever built for a movie, due to the complex shapes involved. Thermo-forming of plastics was new at the time but the studio technical staff managed to create one of the most memorable robots of all time with this process.
Fans of Asimov immediately recognized Robby’s adherence to the Three Laws of Robotics in the robot’s actions throughout the film. It is this manservant’s mindset coupled with the non-human laws that give the robot its delightful character. The Robby the Robot toy was very popular in 1956 right after the movie, and are still available today. The online specialty store Hammacher Schlemmer offers a full-sized replica for $49,999.95. The robot does not walk but his special effects such as relay actuation, head turning, and lights can be remotely-controlled.
Robby’s classic lines from the movie can also be actuated by remote control. His 100 pound body is constructed of Fiberglas, not thermo-formed plastic. Brass, aluminum, and even titanium are used in the construction. Controlled by an advanced microprocessor, he is signed by Kinoshita and plugs into any AC outlet. It was actually Robby and Forbidden Planet that inspired my first robot project. I started out big — way too big. I had seen a robot in Boy’s Life that featured a home-built robot. I used a bunch of plywood — thick 3/4 inch stuff — for the robot’s body. Cosmo stood almost six feet tall and weighed a ton. I used jukebox parts, motors, and lights — all AC driven. The head was a section of tin ducting with light bulbs for eyes and a speaker for a mouth.
I started out trying to make him walk but he was too heavy for the motors that I had so I just used motor-driven wheels. He ‘talked’ via a reel-to-reel tape with recorded messages and was remotely controlled via a long umbilical cable. Quite frankly, the only thing that this robot could do reliably was fall over and shake the whole house.
In February ’87, I wrote an article for Boy’s Life that showed kids how to make a robot out of a trashcan — Gismo2BL — to inspire kids about robotics like I had been years earlier. I heard from the supplier of the motors that 27,000 kids built the robot. There have been several newer versions featured since then.
Other Fictional Robots Inspire Hobbyists
The robot B-9 from the 1965-1968 CBS TV series Lost in Space was another robot that inspired a cult following (Figure 3).

FIGURE 3.
Costing the studio a reported $30,000 each for a pair and weighing in at 200 pounds, these action prop robot suits were controlled by actor Bob May. May passed away in January 2009 and acted in all 83 episodes.
In the story line, the robot could detect danger (remember “Danger, Will Robinson”), could speak, and understand speech. The actual prop was not of the same quality as the first three that I’ve mentioned, but the wheeled-base design allowed many hobbyists to construct fairly accurate replicas. The cartoon TV series The Jetsons featured a robot maid Rosie (Figure 4) who seemed to skate about on what looked to be a roller skate. Since it was a cartoon, it didn’t need a dynamic stability system to balance on such a small base. Since the series was in the future, people just had to have a robot in their house.
FIGURE 4.
Star Wars and R2D2
When Star Wars debuted in May 1977, the general public’s — as well as the robot enthusiast’s — ideas about robot design changed. C-3PO was another walking humanoid with a person inside the suit (Anthony Daniels), but it was R2-D2 (with diminutive actor Kenny Baker crammed inside) that won the hearts of everyone who saw the movie. Certainly George Lucas had access to sophisticated R/C systems even back in 1976, but it took Baker’s movements within the R2D2 shell to create the rocking motion that represented excitement. It was these endearing squeaks and beeps that touched the hearts of movie goers.
There have been hundreds — if not thousands — of R2D2 copies made over the years. What was important for amateur robot builders was that now robots did not have to be humanoid to be interesting.
Influences Drive Robot Design
In 1983, I was approached by Twentieth Century Fox to build some robot action props for the film Revenge of the Nerds. I worked with the art director, prop master, and director trying to define what a typical hobbyist robot should look like. They had their ideas and I had mine, and we settled in the middle with the robot in Figure 5.

FIGURE 5.
Working on this film really helped me understand just what society thinks of robots. Shape, style, and function seem to have been driven by movies, TV shows, as well as books.
Construction methods evolved when certain technologies, cheap mechanical systems, and abundant structural materials became available. As mentioned previously, microcontrollers meant experimenters no longer had to contend with hardwired, relay, or even TTL IC logic for their robots. Early ‘computer controlled’ experimental and kit robots used the Motorola 6800, the MOS Technology 6502 (a different pin-out version of the 6800), the Intel 8080, and the Zilog Z80 microprocessors (the heart of the early eight-bit microcomputers).
Microprocessor manufacturers began to build single-board computers that were great for robotics. The first was the 6502 based KIM-1 first built by MOS Technology in 1976. That was followed up by the SYM-1 and the Rockwell AIM 65 shown in Figure 6. The AIM 65 featured a full keyboard, an alpha-numeric display, and an on-board printer.
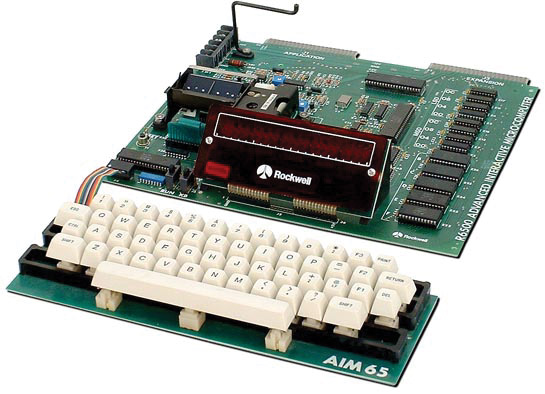
FIGURE 6.
Intel also had an 8080 based single-board computer that was popular for many industrial control applications. Later, the popular Motorola 68HC11 series, the Microchip PIC, and Parallax BASIC Stamp microcontrollers gave home builders computer power at a low cost. The Stamp-based Board of Education (BOE) allowed roboticists to build re-configurable robot controllers with the built-in experimenter board.
Computer Hobbyists Become Robot Competitors
Computer hobbyists soon grew tired of a computer that just sat there, taking in data by keyboard or floppy disk and outputting the data in a different form. They wanted a computer to move around, not just sit there. They wanted it to do more than control house lights via X-10 devices. They wanted it to go to the fridge and bring back a Pepsi. They wanted a robot!
Well, manufacturers listened. The big electronics kit company Heath Kit brought out the Hero line of personal robot kits. The RB5X was another popular robot kit and both are still available today. The Heath Kit Hero has taken on the form of the PC-BOT, called the He-Robot (Figure 7) from White Box Robotics of Ottawa, Canada.

FIGURE 7.
Soon, robot clubs and organizations formed, many as a spin-off from computer or ham radio groups. When people meet to show off their creations, competitions are born.
One of the first events in the late ‘70s was a series of MicroMouse contests sponsored by IEEE in which small microcontroller based autonomous ‘mice’ solved a maze. Another of the earlier robot contests was the Trinity College Fire Fighting Robot Contest where autonomous robots seek out a flame in a maze resembling a home and extingished the fire. (The flame is a candle and the robot locates it via a passive IR sensor then puts it out by a fan or by a balloon popping over the candle.) Go to www.trincoll.edu/events/robot for more information.
Combat Robots Evolve
Many new and different contests have developed from these initial ones. Robot Wars began as remotely-controlled machines that would do as much damage as possible to their opponent, to the thrill of a gathered crowd. BattleBots came onto the scene and soon became a hit on the Comedy Channel. Many sizes of robot classes and many types of weapons were developed.
Today’s combat robots range in size from ounces to hundreds of pounds, and can be outright lethal to a losing opponent.
Robot Sumo started in Japan and has gained popularity around the world. In this competition, two robots face off in a ring and try to push each other out of the ring. They can be radio controlled or autonomous.
Combat, micromouse, and firefighting contests are not the only popular robot competitions. Robot contests for kids such as FIRST, BEST, BotBall, etc., are educational as well as fun. Figure 8 shows the poster for the first FIRST contest back in 1992.
FIGURE 8.
Electronics and Sensors for Today
In the ‘80s, robot clubs formed all across the country as more and more people saw robotics as a fabulous hobby. A lot of new sensors became available around this time such as the Polaroid ultrasonic range finders. These were originally designed for self-focusing cameras but they gave robots ‘eyes’ to the world. Infrared LEDs and IR transistors augmented their senses and robots no longer had to bump into walls and chairs to navigate around a house.
Voice synthesis was one of the first newer technologies that became affordable so experimenters could give their creations “intelligence.” It was speech recognition that was the real coup, however. Now experimenters could verbally command their robots.
Model airplane R/C servos allowed roboticists to build small table-top robots. LEGO Mindstorm’s powerful NXT controller gave inexpensive, yet sophisticated control.
Lower cost GPS modules allowed outdoor navigation and brought forth RoboMagellan contests. Gyros, vision, and speech recognition systems made robots more ‘human.’ Intelligent servos such as the Bioloid series made complex motion control obtainable by home experimenters.
Humanoid robot kits have become very popular, as well as two-wheeled balancing robots. NiCad batteries gave way to lithium-polymer and other, more efficient and lighter battery technologies.
Loki
At the June meeting of the Portland Robotics Society (PARTS), Dave Shinsel introduced his latest creation: Loki, (Figure 9). From Norse mythology, Loki was a mischievous and crafty rascal, and Dave felt that his robot was much the same. Loki moved, spoke, listened, and saw strictly with his own internal sensors and circuitry, though Dave could guide him to a point in a room by a Wii hand-held Blue tooth remote control.

FIGURE 9.
As Loki ‘stood’ at the front of the room and Dave talked about his functions and construction, the robot was looking around the room, centering on faces and objects with his vision system. His eyes are two computer web cams and his computer is a complete laptop in the front of his body. Figure 10 shows Loki actually looking at and identifying a CD in its claw; the arm and claw functions are driven by Bioloid Dynamixel AX12 actuators.
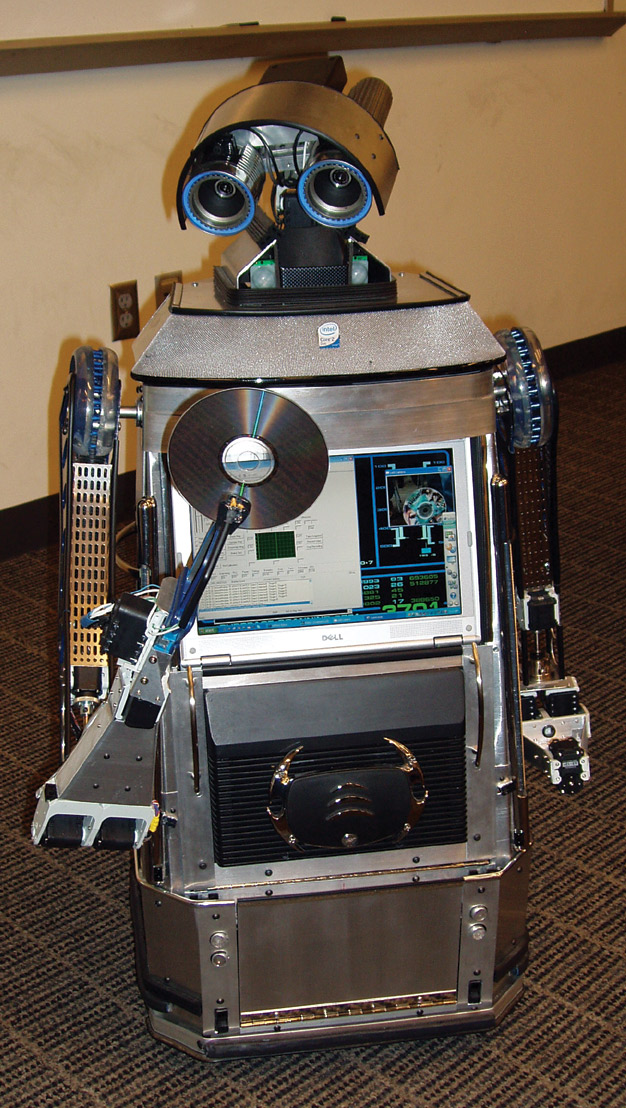
FIGURE 10.
The vertical keyboard is hidden behind a drop-down door but can be accessed for commands. At the time of the presentation, Dave had installed only one complete arm (the right) but plans to have the left arm completed soon.
Final Thoughts
Have we reached the pinnacle of robot evolution? Of course not! Experimenters will continue to improve upon their creations. Everyone has their own idea of what direction to take. There will be advances with rolling and walking robots, as well as with small and large robots. Some roboticists will want their creations to take to the air or dive below the water. Every experimenter will have a different goal and everyone in the field of robotics will benefit. SV
Article Comments