Could a Bird’s Leg Structure Help Engineer Walking Robots?
By Sonali Roy View In Digital Edition
Many of us love birds and enjoy watching them. We’re eager to learn about their food habits, habitats, and physical structure — especially their flying and walking capacity. But, have you ever imagined a bird’s leg structure could inspire constructing a walking robot? Well, read on!
Most people think of flight while thinking of birds. However, Biology Professor Dr. Monica A. Daley at the University of California, Irvine thinks outside the box. Birds remind her of a group of “diverse agile bipedal athletes.” All birds use two legs for walking. Dr. Daley shares, “All birds are bipedal, and inherited bipedalism from a long evolutionary history dating back to therapod dinosaurs ~230 million years ago.” This indicates that birds win over time with their bipedalism and diverse foot structure and function.
Some birds are well-versed in moving over ground on uneven landscape. Some others, as Dr. Daley measures, “move in three dimensions in trees (up/down, sideways, upside down), and others moving over swampy or semi-aquatic habitats, and others striding through water.” So, the planet is gifted with the wonder of a bird’s leg structure — especially those of the flightless ones — standing the test of time with an outstanding mechanism. Walking birds share similar bipedal traits that humans use while walking.
Dr. Daley notes, “Living ground bird species also span a large range in size from tiny quail to large ostriches who all use walking and running gaits that are similar in principle to the bipedal gaits of humans.” Ostriches sometimes run to an average speed of around 70-72 km per hour. They are glorious for their locomotor performance. Dr. Daley says, “The diversity of birds provides a window into different possible solutions for bipedal locomotion and an opportunity to understand how these solutions vary with body size and living in different habitats.”
Birds enjoy diversity in foot and toe configuration and toe and foot length, shape, closely woven trait, and fingernails as well. For these distinctive features, birds can effectively move in different environments. Dr. Daley explains, “Birds have diversity in foot and toe configuration (number and placement of toes), as well as diversity in toe and foot length, shape, webbing, and claws. Variation in these features likely enable effective movement in different habitats.” She adds, “… we can use the combination of biological experiments and physical robot implementation to test hypotheses about foot structure and function.”
Alexander Badri-Sprowitz at Max Planck Institute for Intelligent Systems leading the Dynamic Locomotion Group along with his doctoral student, Alborz Aghamaleki Sarvestani has engineered a robot’s leg sharing similar energy-efficient features with its natural model.
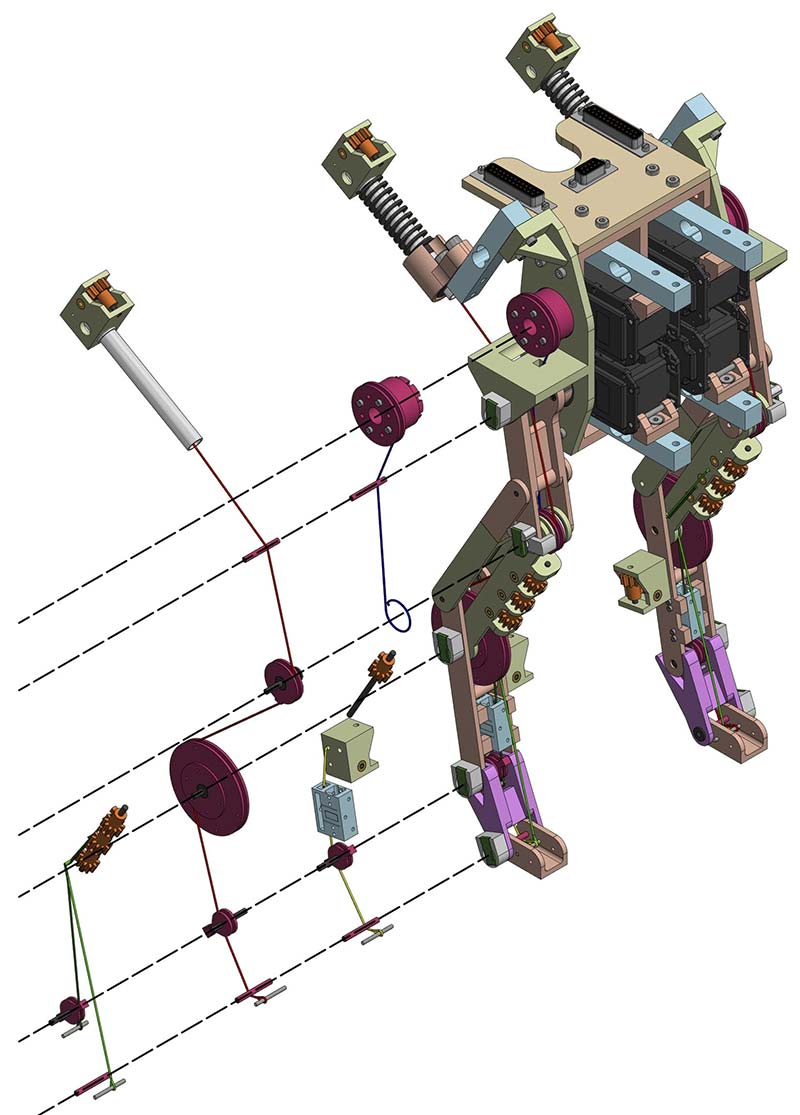
BirdBot’s spring and tendon components are emphasized in this picture. Pulleys of different size hold spring-loaded tendons which produce the required joint and leg forces.
What Led the Researchers to Construct BirdBot?
Dr. Daley, who collaborated with Badri-Sprowitz, noticed that birds are stable and efficient runners. Further observations suggest that birds don’t lose their balance momentarily even while traveling across hindrances. Birds hit the non-stop flights/running despite the fact that their nervous system doesn’t hold on fast reaction.
Badri-Sprowitz shares, “Our collaborator, Dr. Daley observed in many studies that birds are stable and efficient runners. Even when forced to rapidly traverse obstacles they don’t stumble, albeit their nervous system should be unable to react so fast. Dr. Daley hypothesized that the key to this ability must be in the bird’s leg mechanics.”
Several muscles/tendons in larger birds extend across four to five leg joints. Consequently, instead of a single joint, they benefit from multiple leg joints with mechanical coupling. Badri-Sprowitz confirms, “We also know, and observed again here, that large bird’s legs feature mechanical coupling between their leg joints. This mechanical coupling is the result of several muscles/tendons that span multiple joints instead of just a single joint. Some of the muscles/tendons span four to five leg joints.”
During their movements (as compared to humans), birds hook the foot joint. Badri-Sprowitz says, “Our third observation was the distinct foot movement in birds during swing; they ‘flex’ the foot joint differently when compared to humans.” Legged robots finds energy efficiency actuation pivotal while walking with their onboard batteries, which consume a lot of power. Energy-efficient legged robots could help humans in their daily life as delivery robots and have the potentialities to go solar powered on Mars.
Regarding the contribution of observations generated from bird watching, Badri-Sprowitz sums up, “We found that the three observations we made from birds — high locomotion robustness, mechanical coupling of leg joints, and foot movement — could be used to develop a new type of energy-efficient robot.
“BirdBot” mechanically switches its leg joints from ‘loose’ during swing phase into ‘compliant’ during stance phase. The foot and especially its orientation are key here; only if the foot is extended forward does the mechanical switch work, and the leg carries the robot.
Moreover, the nerve conduction velocity in animals is limited, so it causes a large delay where actions are required within a fraction. Badri-Sprowitz says, “We know that the nerve conduction velocity in animals is limited; around 50-100 m/s. That leads to large delays in cases where actions are needed within a time window of a few ten milliseconds.”
How Were the Researchers Inspired?
In the research group of Dr. Daley, Badri-Sprowitz (a trained engineer) was requested to observe the dissection process done by veterinary students. He was quite attracted towards the composite but focused on muscle-tendon structures of the large birds. He says, “In the research group of Dr. Daley, I was invited to watch dissections for veterinary students. As a trained engineer, I was fascinated by the complex yet compact muscle-tendon structures of these large birds. And, of course, we worked with birds and had access to high-speed footage of running birds. Birds are absolutely marvelous; they’re bipeds like us, but they also fly, hop, etc.
Emus and Ostriches Were Inspiring Models
Why the researchers opted for emus and ostriches for their inspiring models lies in the fact that these birds have the capability to move fast with ease. Besides, they’re bipedal. They showcase better talent while compared to humans in respect to speed and weight. Hence, Badri-Sprowitz looks upon large and flightless birds as the “excellent model animals.” He says, “They are bipedal, agile, and can exceed human performance in terms of speed and weight.”
Moreover, previously, Dr. Daley recorded that birds are vigorous runners. Dr. Daley further indicated that birds have something special that enables them to act faster than their nervous system permits. Some of the responses as noted by Dr. Daley were “below the threshold of nerve conduction delay” in the words of Badri-Sprowitz. Bird legs enjoy many multi-joint tendons. That’s why the research team observed multi-joint coupling. Badri-Sprowitz describes, “Birds feature a more zig-zag (z-shaped) leg structure — humans use a fairly straight leg during stance when the foot is in contact with the ground. Finally, birds flex their toes (‘feet’) backward during swing (when they lift legs) — as humans, we use our ankle joints maybe half that range.”

BirdBot as a rendered image.
Reasons Behind Certain Bird Movements
What are the potential reasons behind such activities of birds that while pulling their legs up towards their bodies, birds fold their feet back? Badri-Sprowitz says, “Our explanation for the foot’s movement in birds is the engagement and disengagement of a global muscle-tendon network. The foot is part of a large clutching mechanism, where it acts as a lever arm.”
As far as BirdBot is concerned, the research team utilized this very foot movement for engaging and disengaging the leg’s spring. The toes are folded back while swinging. The rest of the leg joints are connected to the tendon of the toe. Badri-Sprowitz describes, “… this toe flexing action (toes folded back) releases tendon length which releases leg joints. By that, the leg can be flexed freely, without needing to control the joint extending muscle/spring, and have it ‘relax’ and extend. Its stance when the foot will touch the ground and carry the robot/bird, the foot’s cam pulls on that same (global) tendon, which pulls on each joint.
That compliantly locks the leg, and it functions as a springy leg in stance phase.”
Does the Size of Birds Somehow Influence the Current Innovation?
As mentioned, the researchers engineered BirdBot by concentrating on larger birds like emus and ostriches. So, the question arises if the size of birds matters in constructing the robot. The research team watched the mechanical coupling in large birds and assessed them in emu cadavers. They believe both larger and smaller birds share the same mechanism, though could not show them. Badri-Sprowitz asserts, “Smaller birds often perch and sleep on branches, and might need foot mechanics that are adapted for this task.” He adds, “The example of emus and ostriches showed us that large robot legs, based on these leg morphologies, are plausible.”
What Formula of the Natural Model Did the Researchers Use to Construct the Robot Leg?
To construct the robot leg, the researchers followed the natural model and directly transferred the concept of mechanical joint coupling. Badri-Sprowitz explains, “We directly transferred the concept of mechanical joint coupling; that is, we implement a spring-tendon that spans all robot leg joints, similar to a multi-joint muscle-tendon of birds. We mimic bird’s sesamoid bone surfaces as pulleys. And we mimic the foot movement of running, ratite birds.
The spring-tendon attaches on one side to the spring and on its other end to the foot; rotating the foot around the foot joint, therefore, releases or locks all leg joints that are spanned by its tendon. It’s a bit like a lashing belt system. BirdBot’s foot is practically a clutch for the leg’s parallel spring.”
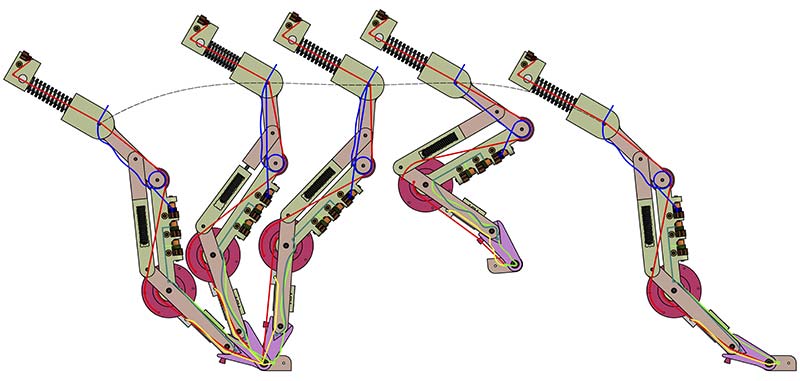
Motion sequence of BirdBot’s leg: left is touch-down; then stance (the three first snapshots on the left); then mid-swing with the leg’s characteristic leg flexing posture; and back to touch-down on the right. Springs and spring-tendons are shown on top.
How Did the Researchers Construct the Robot Leg?
After taking these three main concepts of a long spring-tendon, a segmented foot acting with its lever action, and multiple joints coupled by the spring-tendon, the researchers expanded equations. Badri-Sprowitz reports, “We then developed equations that allowed us to dimension the pulley sizes according to the distance of their joints and the leg axis.” He further details, “We added features like BirdBot’s disengagement tendon; it works as a snap-through of the tensioned leg at the end of stance and releases stored energy. Two servo motors drive each leg: one swings the leg forward and backward; one lifts the lower leg in swing off the ground. For this study, the robot walks on a treadmill and is held in-plane by a freely moving four-bar mechanism; a bit like a harness for toddlers. BirdBot is not yet designed to run freely in 3D. Most robot parts are 3D printed; a few metal pins are cut from stock materials. In sum, five tendon networks mechanically guide the leg’s segment movement, either in stance or in swing. For this research project, BirdBot is heavily sensorized; we measure joint torques and forces, cable forces, joint positions, and motor power input.”
Insights into the Functioning, Processing, and Utilization of BirdBot
Functioning
The spring-tendon network of BirdBot exhibits five spring-tendon structures. The global or main spring-tendon of BirdBot spreads all joints and stretches those joints in stance phase when the toe is on the ground. Badri-Sprowitz explains, “The global spring is compressed, and its deflection is distributed among all leg joints, based on joint loading equality and inequality conditions that we mechanically set in advance.” He continues, “To function properly, the toe needs to be ‘extended’ before touchdown, using two toe extensor tendons that are also multi-joint tendons. If the toe happens to be improperly oriented (flexed, instead of extended) at touch-down, the leg will collapse. Hence, the foot and its lever arm mechanism inserted into the global spring-tendon presents a clutch mechanism.”
A knee flexing tendon is linked to a motor. Badri-Sprowitz further adds, “… the motor pulls the leg up during swing phase when the leg is pulled forward. A two-joint disengagement supports disengaging the global-spring tendon at the end of stance phase. The stored energy is rapidly released by a snap-through joint embedded into the lower leg. A hip motor swings the leg forward and backward.”
Processing
In the very proof-of-concept, the researchers run a pattern generator called a Central Pattern Generator on a PC. Badri-Sprowitz says, “Its trajectory output is relayed to the robot’s servo motors in feedforward control.” To characterize the robot, the research team records its joint angles, several tendon forces and joint torques, and motor currents.
Utilization
Presently, BirdBot is a planar robot running ‘in-plane’ “guided by a slider-mounted parallel mechanism that enables the robot to run on a standard treadmill.” “The parallel mechanism works a bit like a toddler’s jolly jumper,” opines Badri-Sprowitz.
Features of the Newly Constructed Robot Leg
Badri-Sprowitz and his team noticed that the highly energy-efficient BirdBot runs fast with very large steps, which are unusual in line with legged robots. Badri-Sprowitz affirms, “Leg clutching works mechanically; no sensors and no controller are needed to switch the swing leg function into the stance leg function.” With the large leg of 1.7 m and with their equations, the research team shows that their mechanism is “scalable” to large sizes and could throw insights into the evolution of large-legged animals, as well as help develop robots carrying tons of payload by consuming low power and utilizing small motors.
Weighing about 1.73 kg with a hip height or leg length of 0.29 m, BirdBot is highly energy efficient; it holds on to the capacity “with a relative cost of transport of 91% of that of an animal of the same weight (metabolic cost of transport),” in the words of Badri-Sprowitz. The researchers also have a single BirdBot leg of 1.7 m high sharing similar adult human experiences. Their small BirdBot runs at 0.75 m/s at the locomotion frequency of 1.5 Hz.
However, the energy-efficient BirdBot differs from its natural model in that it doesn’t use all the bird’s muscles and tendons. It focuses only on two toe segments on a single toe. For instance, ostriches and emus feature two and three toes, respectively. At the same time, however, BirdBot shows more leg segments as compared to most legged robots and “is relatively close to its natural model in terms of ‘bones.’”
BirdBot possesses five spring-tendon mechanisms, whereas birds have some 30-40 leg muscle-tendons. Presently, legged robots avoid the complications of the possibility of adding more motor-sprint-tendons.
Interesting and Differentiating Traits of BirdBot
Generally, everybody thought that a nervous system with sensors and muscles is needed for completing the task of switching the robot according to its setup.
So, the most interesting trait regarding the newly constructed BirdBot (or robot leg) is that legs can be operated fully mechanically as Badri-Sprowitz mentions, “We could show, for the first time, that legs can be switched fully mechanically between the swing and stance phase, from a leg with loose joints into a leg with compliantly locked joints. So far, everybody assumed that a nervous system is required for this task, with sensors and muscles that are controlled to contract and relax exactly in time.”
He continues, “Our work shows that this function can be provided by mechanics like that observed in bird legs. Mechanics are inert to sensing inaccuracies, transmission delays, or false assumptions from the controller side.”
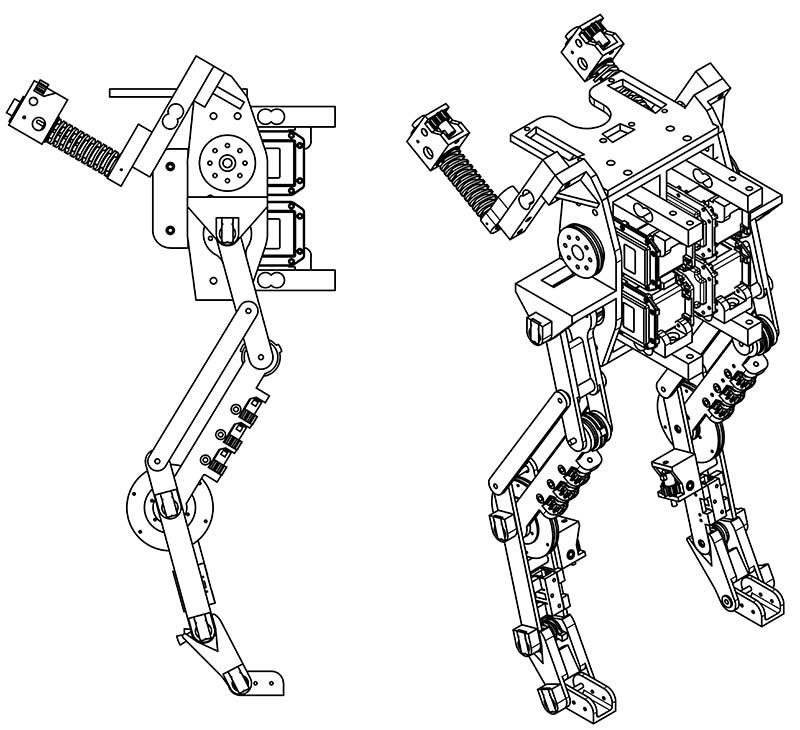
BirdBot side view and diagonal view.
Earlier Research on the Robot Leg
BirdBot’s “clutching mechanism” differentiates it from its predecessor, Cheetah-cub, sharing the “same motors run with a relative cost of transport of 396%; that means it was four times less efficient” as explained by Badri-Sprowitz. Earlier, he worked on the bio-inspired and quadrupedal legged Bobcat robot and Oncilla robot at the laboratory of Dr. Auke Jan Ijspeert at EPFL, Switzerland. Later, he took part shortly in research of the ATRIAS robot at the lab of Dr. Jonathan Hurst at Oregon State University. ATRIAS — a very large biped robot — is the predecessor of the Cassie robot.
The three quadruped robots with parallel leg springs are easy to control, but there is the limitation that they consume higher power while swinging legs. Featuring large leg springs, the ATRIAS robot possesses series elastic actuators with big brushless motors. Badri-Sprowitz states, “ATRIAS recuperates some of its negative power; its motors work as generators for a few ten milliseconds every locomotion cycle, which saves energy. Otherwise, ATRIAS uses high power in the stance phase.” So, as compared to the earlier robot designs as mentioned above, BirdBot concentrates on avoiding high power consumption. Besides, for a clutching mechanism, BirdBot’s legs don’t need the power input from a motor while carrying itself. Moreover, the spring is switched off on leg swing.
The Mechanism Used in Constructing the Present Robot Leg
The spring-tendon mechanism is comprised of muscles and tendons; it contributes much in constructing the present robot leg. Via individual joint pulleys, the spring-tendon spreads across multiple leg joints. Multiplied by pulley radius, tendon force produces joint torque.
So, why is the system designed this way? Badri-Sprowitz explains, “The system is designed so that joints feature a spring-tendon based torque that exactly counters the required torque of body weight and distance of the joint to the virtual leg-foot axis.” He continues, “The foot joint is an exception; here, we under-dimension the pulley, so it collapses and acts as a self-engaging clutch.”
How Did the Researchers Test Their Hypothesis?
The researchers needed to prove their hypothesis that the mechanical programming works throughout the cycle of the sequence of the foot movements, “ideally at several robot speeds.” Badri-Sprowitz says, “The foot needed to be in the right orientation within a few ten milliseconds before impact, to engage the leg spring-tendon mechanism.”
He further adds, “The disengagement mechanism needs to correctly disengage the leg at the end of the stance, also again within a few ten milliseconds. The leg must swing high enough for sufficient ground clearance.”
The researchers implemented a central pattern generator controller capable of sending “sine wave-like step-like trajectories to the robot’s hip and knee motor.” They adjusted all the five tendon networks per leg and ran the BirdBot on a treadmill. After that, they measured the speed, power consumption, and general dynamics of the robot.
How Can This All Be Applied?
As compared to the earlier designs, the clutch mechanism of BirdBot’s leg lowers the robot’s power and actuator requirements to a great extent. The leg compliance engagement mechanism of the robot is really mechanistic and works instantly.
This mechanism enables the robot to be easy to control and robust to walk and run from the perspective of the action of driving or pushing forward. That’s why the researchers expect that the leg design of BirdBot will shine in outdoor applications, “where natural and difficult substrates make it hard for more conventional robot feet to establish proper ground contact.”
Badri-Sprowitz says, “Ideally, legged robots should become energy-autonomous for 24/7 operation; for example, through solar power. We believe BirdBot’s leg design is a big step towards this goal, and a robot with its leg mechanism could walk on Mars sometime soon.” He opines, “Through our calculations and based on our big BirdBot leg prototype, we know its leg design is scalable to large size, both from a load-bearing perspective and an actuation perspective.
Large living animals and even more so large extinct animals show that robot legs can be much larger than what we’re used to seeing today. That opens doors for applications in construction, agriculture, and forestry engineering. On a smaller size scale, we also see applications for robotic exoskeleton and prosthetic designs based on BirdBot’s mechanism.”
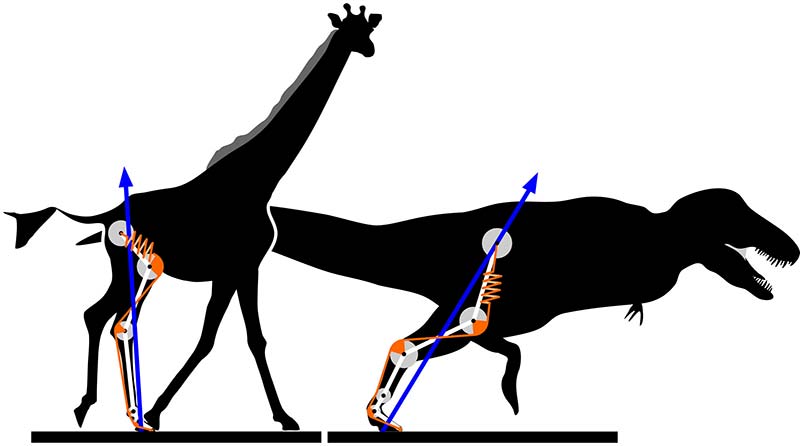
BirdBot’s leg mechanism is scalable. From BirdBot’s design equations, the researchers expect to be able to build robots of the size and weight of large animals, like the giraffe and the T-rex shown here.
Insights into Animal Structure Achieved
The current study is significant both for robotics and understanding and throwing insights into animal structure as well because the researchers explain how large animals could locomote with low metabolic cost of transport. The muscles of large animals “can be set into isometric muscle mode where they mostly act as springs.”
Similar to BirdBot, the animal’s muscle-tendons then would work like springs. Moreover, they explain the stunning locomotion stamina of running birds. Leg mechanics could lead to basic leg joint forces. Badri-Sprowitz says, “Basic leg joint forces can be the result of leg mechanics, instead of the animal’s nervous system. That is a completely new perspective on animal locomotion control.”
Scalability matters for legged robots. Large robots require heavy and expansive motors so they can carry their weight. The clutching mechanisms of BirdBot are very light in nature. Badri-Sprowitz claims, “It even creates a tensegrity leg structure where forces are separated as tensile and compressive forces. That makes for lightweight designs.”
The current innovation is also significant in that the low energy consumption of BirdBot sets an example for engineering future legged robots. The finding ensures that the researchers are hopeful in facilitating remote locations with robots. Badri-Sprowitz becomes optimistic while saying, “Overall, BirdBot’s low energy consumption will become important for future legged robots. With that, we can aim to run robots based on solar power in remote locations 24/7 without a power plug.”
He says, “We hope with BirdBot we can convince more researchers of the several added values (scalability, robustness, energy efficiency) of a clutch-able spring-tendon leg mechanism.”
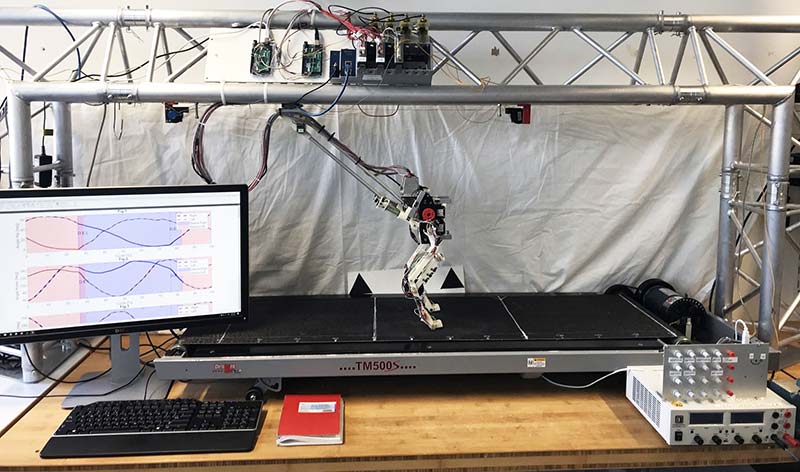
BirdBot’s experimental setup. The robot stands at the center of the photo on an off-the-shelf treadmill. The robot is guided by a moveable parallel mechanism mounted to its back. Sensor signal processing is mounted above the robot. A custom control board on the right allows setting the robot’s gait parameters such as leg amplitudes, gait frequency, and gait duty factor.
What is the Future Perspective of the Research?
The researchers are now engaged in achieving the fusion of BirdBot’s legs into a quadruped robot. They are also working on operating the robot as a fully bipedal one, “likely with additional motors.” They are delighted to carry on “characterizing the mechanism itself.”
Badri-Sprowitz shares, “BirdBot-1, as presented here, features mechanism parameters that were chosen as a proof-of-concept.” As the equations and the technical functionality of the current designing are concerned, the researchers are well-acquainted to the consequences that future modifications would surely change the robot’s performance.
Badri-Sprowitz and his team believe, “… that is what we see in nature; ostrich and emu legs are similar but not identical. What differs are for example segment lengths, muscle-tendon network connectivity, and moment arms of muscles and tendons. We are very interested in understanding these details.”
Another topic the research team is interested in is actuation. The legs of BirdBot are actuated to an extremely small extent as is exemplified in the absence of actuated leg expansion. Instead, BirdBot features hip joint actuators. Badri-Sprowitz states, “Animal legs use muscles to actively extend most of their joints.” He expects, “We will include more actuators in future designs.”
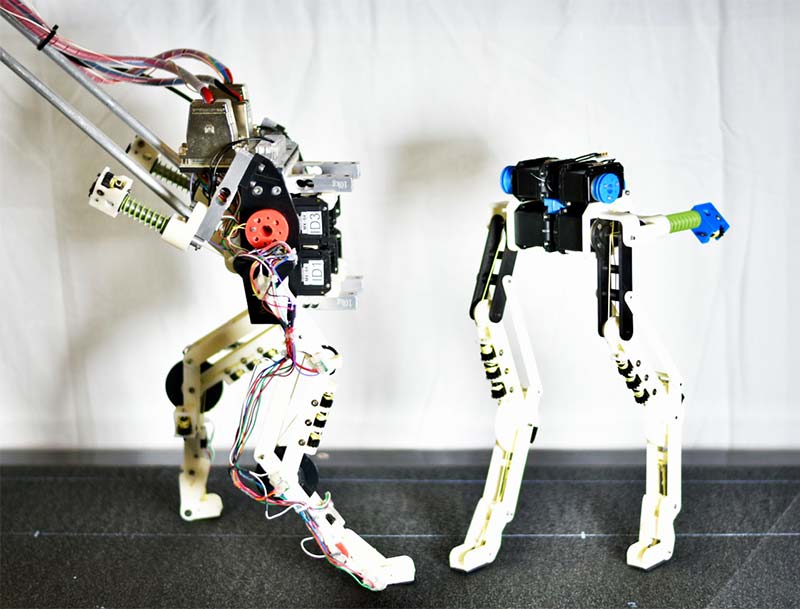
On the left is BirdBot in its instrumented form and attached to a moving four-bar mechanism made from aluminum tubes. On the right, BirdBot is shown without sensors mounted.
Dr. Daley expects for much more fascinating work to understand “how different foot structures can enable agile, stable, and economic movement in different habitats and over different kinds of substrates, and bio-inspired feet in robots could enable us to test the function of biological feet while further innovating in robot design.”
She shares her impression: “BirdBot is an early prototype that demonstrates the coordinated function of the elastic spring-tendon network for facilitating economical gait with simple and rapid mechanical control.” She’s excited to see BirdBot further refined in the future.
The future modification as to her expectation could include the adjustment of the segment lengths, particularly the foot structure. She believes, “effective foot design and function will help enable balance control and turning stability when the robot is built to move in three dimensions.”
Finally, Badri-Sprowitz provides the link where BirdBot’s CAD files are at https://edmond.mpdl.mpg.de/dataset.xhtml?persistentId=doi:10.17617/3.ETFG41. He says, “For the tinkerer, maker, and researcher among your readers, BirdBot’s CAD files are freely available at the link given for non-commercial use. We are always happy to see our research replicated and extended.” SV
Copyright with DLG MPI-IS and UC Irvine. Badri-Sprowitz, A., Sarvestani, A. A., Sitti, M., & Daley, M. A. (2022). BirdBot achieves energy-efficient gait with minimal control using avian-inspired leg clutching. Science Robotics; https://doi.org/10.1126/scirobotics.abg4055.
Article Comments