Bot in Brief
Morphobot Morphs A Lot
Robotics engineers often look to animals for inspiration for more effective and efficient artificial limbs, joints, and muscles. One particularly good source of inspiration comes from studying creatures that use their limbs for different kinds of mobility such as amphibians that both walk and swim, or birds that both walk and fly.
Engineers at Caltech and Northeastern University (in Boston) have now developed a multimodal robot that can navigate in not just a couple of ways, but in eight different ways — including walking, crawling, rolling, tumbling, and even flying. That said, the Multi-Modal Mobility Morphobot (M4) looks more like a sleek little cart than any kind of animal.
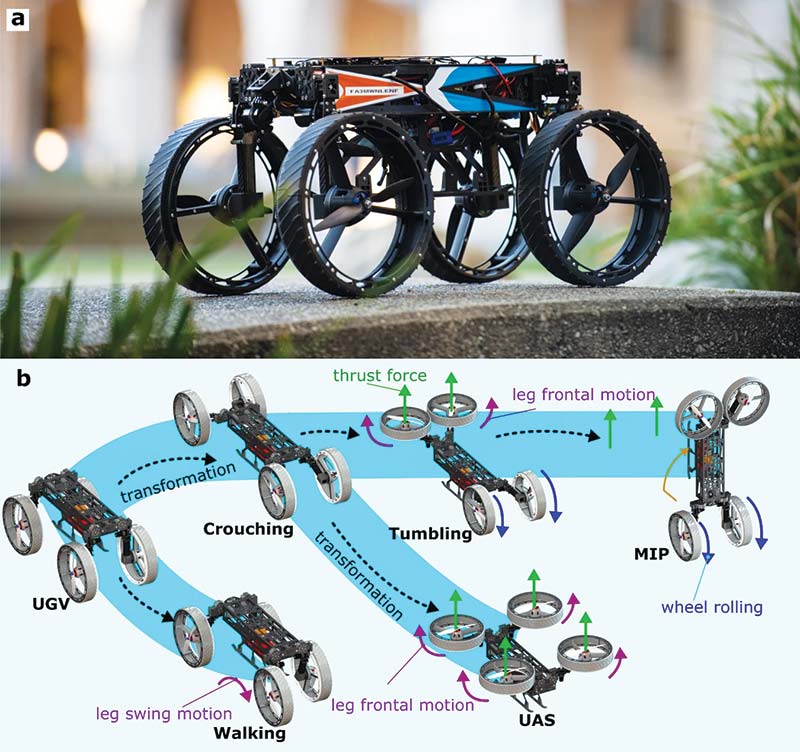
A: Shows M4 in wheeled mode. B: Illustrates cartoon depictions of M4’s transformation to other modes.
M4 is 70 centimeters long and 35 cm high, with four legs with two joints each. It has two ducted fans at the ends of each leg, which can function as either legs, propellor thrusters, or wheels. The robot is surprisingly light (around 6 kilograms) considering that this includes its onboard computers, sensors, communication devices, joint actuators, propulsion motors, power electronics, and battery.
It’s capable of autonomous, self-contained operations. Integrating so many modes of transport on a single platform is a first, commented Alireza Ramezani, a robotics engineer from Northeastern University and one of the lead investigators on this challenge.
The task called for challenging design considerations: “In multimodal robot design, as the number of modes [of locomotion] increases, each mode introduces its own design requirements,” he explained. To integrate all these design requirements, the researchers had to play with various trade-offs.
Repurposing was the key to making the design of M4 scalable; that is, increasing its payload capacity without compromising its mobility. Focusing on how the robot could reuse its existing appendages for different locomotions without introducing added mass freed up payload capacity for computers, sensors, etc. The scalability was achieved by redundancy manipulation.
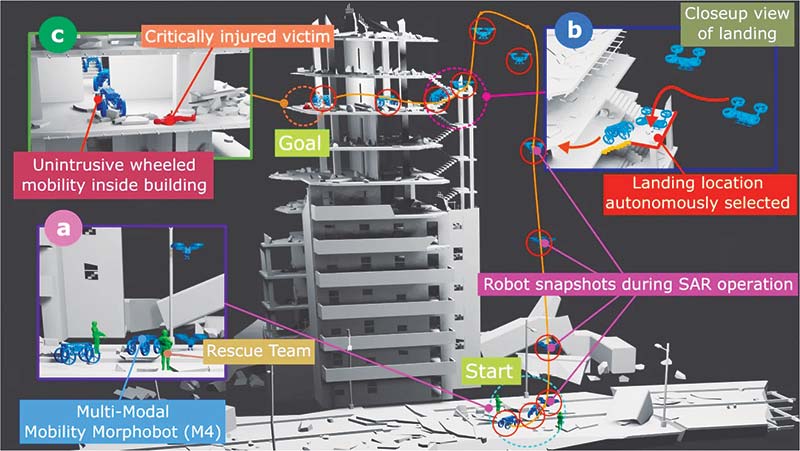
A: An illustration showing the deployment of M4 outside a collapsed multi-story building in the aftermath of an earthquake. B: M4 employs its aerial mobility to quickly reach and land on inaccessible locations. C: Other modes, such as wheeled mobility, are employed when a flight is impossible. (Images courtesy of Nature Communications.)
In other words, M4 can use its four appendages to roll like a ground vehicle or crawl as a quadruped, but it can also stand up on two appendages. While standing, the robot has a higher vantage point and more dynamic locomotion, but as a quadruped, it has four contact points with the environment and is therefore more stable.
Using its onboard sensors and computers, M4 was able to negotiate an unstructured environment by switching from rolling to flying. “The next step for us is to have all of [M4’s] modes of mobility being used by the robot in a completely autonomous fashion based on the sensory information that it gathers from the environment,” Ramezani explained.
The researchers are still looking to improve M4. “There is no end to what you would like to see from a robot like this,” Ramezani says. “For instance … it doesn’t take much to extend the existing capabilities of M4 to underwater locomotion using its quadcopters.” Meanwhile, they also continue to work on making M4’s existing mobility modes more efficient.
Quibble with QIBBOT
Inspired by the final fight scene of the 2011 film, Real Steel, researchers have created a similar teleoperated robot called QIBBOT that mimics the real movements of a human fighter. Not only can this robot pack a punch, it does so with unprecedented speed. With a latency of just 12 milliseconds, it’s likely the fastest teleoperated robot designed to date, its creators claim.

The researchers put QIBBOT to the test against an AI-guided opponent that learns and adapts while it fights. You can watch the battle at https://www.youtube.com/watch?v=CMBEwsTyHog.
Yining (James) Geng is the CEO of Qibo Robot Co. in Weihai, China, which led the development of QIBBOT. “Taking inspiration from the film [“Real Steel”] and incentivized by the entertainment value, we decided to see if we can realize the concept of real-life fighting robots,” he stated. “We thought players’ experience with big and real robots would be very new and different from computer games.”

Several different teleoperated robots already exist, but these have completely different purposes. Most tend to be small and only move at slow or medium speeds. “Fast speed is the first priority of fighting robots,” Geng said.
With teleoperated robots, there are a lot of different aspects that factor into their speed, including communication, interface, actuation, transmission, the controller, and computation.
“We optimized the mechanical system design of QIBBOT for fast response, and that has a price — the accuracy,” commented Geng. He noted that although accuracy may not matter as much in a fight scenario, it would be important if this tech was adapted for other purposes.
Fly, Float, and Roll

Instead of one autonomous robot to fly, another one to drive on land, and a third one to navigate on water, this new hybrid drone can do all three.
The idea for a drone capable of navigating land, air, and sea came when researchers at New York University Abu Dhabi’s Arabian Center for Climate and Environmental Sciences (ACCESS) noted they would like a drone “capable of flying out to potentially remote locations and sampling bodies of water,” stated study lead author Dimitrios Chaikalis, a doctoral candidate at NYU Abu Dhabi.
Environmental research often “relies on sample collections from hard-to-reach areas,” Chaikalis explained. “Flying vehicles can easily navigate to such areas, while being capable of landing on water and navigating on the surface allows for sampling for long hours with minimal energy consumption before flying back to its base.”
The new autonomous drone is a tricopter with three pairs of rotors for flight, three wheels for roaming on land, and two thrusters to help it move on water. The rubber wheels were 3D printed directly around the body of the main wheel frame, eliminating the need for metal screws and ball bearings which would run the risk of rust after exposure to water. The entire machine weighs less than 10 kilograms, in order to comply with drone regulations.
A buoyant, machine-cut Styrofoam™ body was placed between the top of the machine (which holds the rotors) and its bottom (which holds the wheels and thrusters). This flotation device serves as the machine’s hull in the water and is shaped like a trefoil to leave room for the airflow of the rotors.
The drone possesses two open-source PX4 autopilot systems: one for the air, and the other for navigating both land and water. “Aerial navigation differs heavily from ground or water surface navigation, which actually bear a lot of similarities with each other,” Chaikalis explained. “So we designed the ground and water surface navigation to both work with the same autopilot, changing only the motor output for each case.”
An Intel NUC computer serves as the command module. The computer can switch between the two autopilots as needed, as well as interface with a radio transceiver and GPS. All these electronics are secured within a waterproof plastic casing.
The drone can operate under radio control or autonomously on preprogrammed missions. Its lithium polymer batteries give it a flight time of 18 minutes.
(W)Holey Guacamole!

Chipotle Mexican Grill is now trying out Autocado: an avocado processing cobotic prototype that cuts, cores, and peels avocados before they are hand-mashed to create the restaurant’s famous guacamole. The prototype, developed in collaboration with Vebu Labs, is currently being tested in Irvine, CA.
Here’s how Autocado works: A team member loads Autocado with a full case of ripe avocados and selects the size setting. Autocado can hold up to 25 lb of avocados at once. One at a time, avocados are vertically oriented, then transferred to the processing device.
The avocados are sliced in half. Their cores and skin are automatically removed, and the waste is discarded. The fruit is safely collected in a stainless-steel bowl at the bottom of the device.
A team member removes the bowl of avocado fruit and moves it to a counter where they add additional ingredients and hand-mash the avocados to make the signature condiment.
Slither Like Flipper
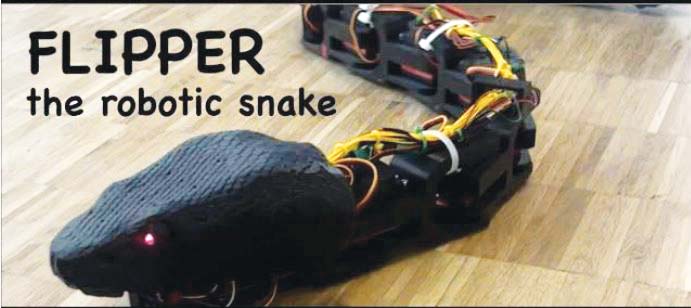
Meet Flipper: an impressive robot snake measuring 1.2 meters and crafted from 13 intricately designed 3D printed pieces. With its remarkable capabilities, Flipper elegantly navigates and explores its surroundings. This versatile robot boasts three distinct modes of motion: Inchworm, Concertina, and Undulation. The Inchworm mode enables precise inch-by-inch movement; the Concertina mode mimics a graceful accordion-like motion. In the Undulation mode, Flipper effortlessly slithers with a mesmerizing sinusoidal movement. Flipper’s innovative design and diverse locomotion options make it a remarkable robotic creation.
Serpentine robots are a ground-breaking innovation in robotics. These flexible and slithering machines excel at navigating complex and confined spaces, offering a lot of potential in various fields.
In search and rescue scenarios, for example, robotic snakes are excellent at maneuvering through narrow and cluttered environments such as collapsed buildings or debris. With their flexible bodies, they can easily navigate tight spaces, climb obstacles, and explore inaccessible areas. Equipped with cameras and sensors, these robots can transmit real-time data, aiding rescuers in locating survivors and assessing surrounding conditions.
With the objective to undertake a project that would have practical relevance in the real world, this year, a team of EPFL bachelor’s students at the School of Computer and Communication Sciences (IC) undertook a project to make a robot snake as part of their “Making Intelligent Things” course. The five members of the Flipper the Robot Snake team included: Robin Bochatay, Cherilyn Christen, Lea Grieder, Giovanni Ranieri, and Leila Sidjanski.

The team had a solid understanding of algorithms, programming languages, and system design, however, no direct experience in building robotic systems. They embraced the opportunity to expand their expertise.
“The first thing we started on was the design of the pieces that we were going to print even though we have no background in 3D design. We also had to figure out how the snake would move smoothly and this was very difficult in the code. We had to continually tweak the parameters and it was a lot of trial and error. Finally, another very practical challenge was allocating and timing the tasks between us, because you can’t start testing the snake if the hardware isn’t finished and you can’t start testing its movement if you haven’t connected the cables together,” explained Grieder.
For the team, one of the most gratifying things about the course and their project was being able to show what mathematics can do.
“Until now, the math in our studies has been abstract. For me, math is imaginary, you can’t really see it, and through Making Intelligent Things we were able to do something physically, put all of our knowledge to the test, and build something that was really cool. Our families were amazed at what we built in such a short amount of time and saw that we were enjoying ourselves immensely,” added Sidjanski, a second year Bachelor in Communication Systems student.
To see Flipper in action, go to https://youtu.be/mGbinKsSFXk.
Go2 the Dogs

About two years ago, Hangzhou, China–based Unitree introduced the Go1: a $2,700 quadruped robot. Since then, the Go1 has had a huge influence over the small quadruped-research market due to its unique combination of performance, accessibility, and being super cheap (as legged robots go).
However, Unitree has just announced the Go2: a new version that manages to be both significantly better and a lot cheaper. It’s faster and more agile and now even includes LiDAR, but somehow only costs $1,600.
This base model — the Go2 Air — can move at a brisk 2.5 meters per second with a seven kilogram payload, and operates for up to two hours with a 8000 milliamp-hour (mAh) battery. There’s even a graphical programming interface, if you have no idea what you’re doing but just want to mess around. It also includes a chin-mounted 360x90 degree hemispherical LiDAR, which has a minimum sensing range of 0.05 meters for intelligent terrain navigation and obstacle avoidance.

Like its predecessor, the Go2 is available in several different models. For $2,800, you get the Go2 Pro which has an additional kilo of payload capacity, an extra meter per second of speed, onboard computing, and 4G connectivity. It also comes with side following, in case you’d like it to go for a jog alongside you. If you need even more, the Go2 Edu (which you’ll have to contact Unitree about directly) boasts a peak speed of 5 m/s, has force sensors on its feet, and will run for up to four hours with a 15,000 mAh battery.
Go2 boasts a variety of characteristics a real dog would hav, such as jumping, stretching, shaking hands, cheering, pouncing, and sitting down. The body is made up of aluminum alloy and high-strength engineering plastic.

Integration of OpenAI’s GPT enables great language capacity and a large language base, enabling Go2 to fully understand its user’s intentions and surroundings.
This means that humans can speak to the robodog, and it will be able to keep up with the conversation and interpret a user’s prompts to help them better.
Eat My Drone
Drones can be very useful in disaster scenarios by transporting food and water to people in need. Unfortunately, whenever a drone needs to transport anything, anywhere, the bulk of what gets moved is the drone itself. Most delivery drones can carry only about 30 percent of their mass as payload because most of their mass is both critical (like wings) and comprised of things that are essentially useless to the intended target (like wings).
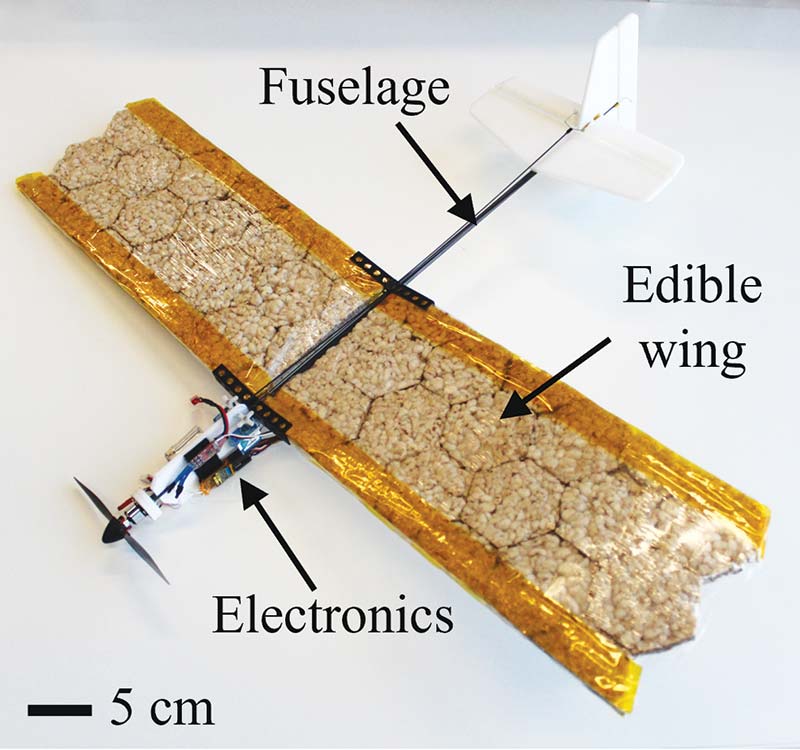
At a recent IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), researchers from the Swiss Federal Institute of Technology Lausanne (EPFL) presented a paper describing a drone that can boost its payload of food from 30 percent to 50 percent of its mass. It does this with the ingenious use of wings made from rice cakes that contain the caloric equivalent of an average unbalanced breakfast.
The reason for this drone’s existence is to work toward the effective and efficient delivery of food to someone who — for whatever reason — really needs food and isn’t in a position to gain access to it in any other way.
The idea is that you could fly this drone directly to them and keep them going for an extra day or two. You obviously won’t get the drone back afterward (because its wings will have been eaten off), but that’s a small price to pay for potentially keeping someone alive via the delivery of vital calories.
The researchers designed the wing out of compressed puffed rice cakes because of the foodstuff’s similarity to expanded polypropylene (EPP) foam. EPP foam is something that’s commonly used as wing material in drones because it’s strong and lightweight; puffed rice shares those qualities.
Though it’s not quite as strong as EPP foam, it’s not bad. It’s also affordable, accessible, and easy to laser cut. Plus, the puffed rice has a respectable calorie density — at 3,870 kilocalorie per kilogram, rice cakes are on par with pasta, just with a much lower density.
Since the rice cakes that were used are round, the first step in fabricating the wing was to laser cut them into hexagons to make them easier to stick together. The glue is just gelatin, and after it all dries, the wing is packaged in plastic and tape to make sure that it doesn’t break down in wet or humid environments. It’s a process that’s fast, simple, and cheap.
The size of the wing is actually driven not by flight requirements but by nutrition requirements. In this case, a wingspan of about 70 centimeters results in enough rice cake and gelatin glue to deliver 300 kcal, or the equivalent of one breakfast serving, with 80 grams remaining for a payload of vitamins or water or something like that. The formula the researchers came up with to calculate the design of this avian appetite quencher assumes that the rest of the drone is not edible, because it isn’t. The structure and tail surfaces are made of carbon fiber and foam.
While this is just a prototype, the half-edible drone does actually fly, achieving speeds of about 10 meters per second with the addition of a motor, some servos to actuate the tail surfaces for control, and a small battery. The next step is to figure out a way to make as many of those nonedible pieces out of edible materials instead, as well as finding a way to carry a payload (like water) in an edible container.
For anyone interested in “digesting” the paper, it’s titled “Towards Edible Drones for Rescue Missions: Design and Flight of Nutritional Wings,” by Bokeon Kwak, Jun Shintake, Lu Zhang, and Dario Floreano from EPFL.
Go Natural with PickGPT

Sereact, a German-based AI and robotics developer, offers a robotics transformer that combines large language models (LLMs) with the company’s computer vision technology called PickGPT. Employees can now use voice-based instructions or intuitive user interfaces instead of requiring complex programming skills to control robots.
PickGPT allows robot operators to instruct robots using natural language by enabling robots to process natural language and visual information, and correlate multimode data. PickGPT allows robots to perceive their environment with unprecedented intelligence and accuracy, and understand and execute instructions in natural language.

PickGPT is a software-based robotics system that doesn’t require programming or training. Because of this, PickGPT expands the range of people who can work with robots as they don’t need a coding background to work with the system.
Article Comments